
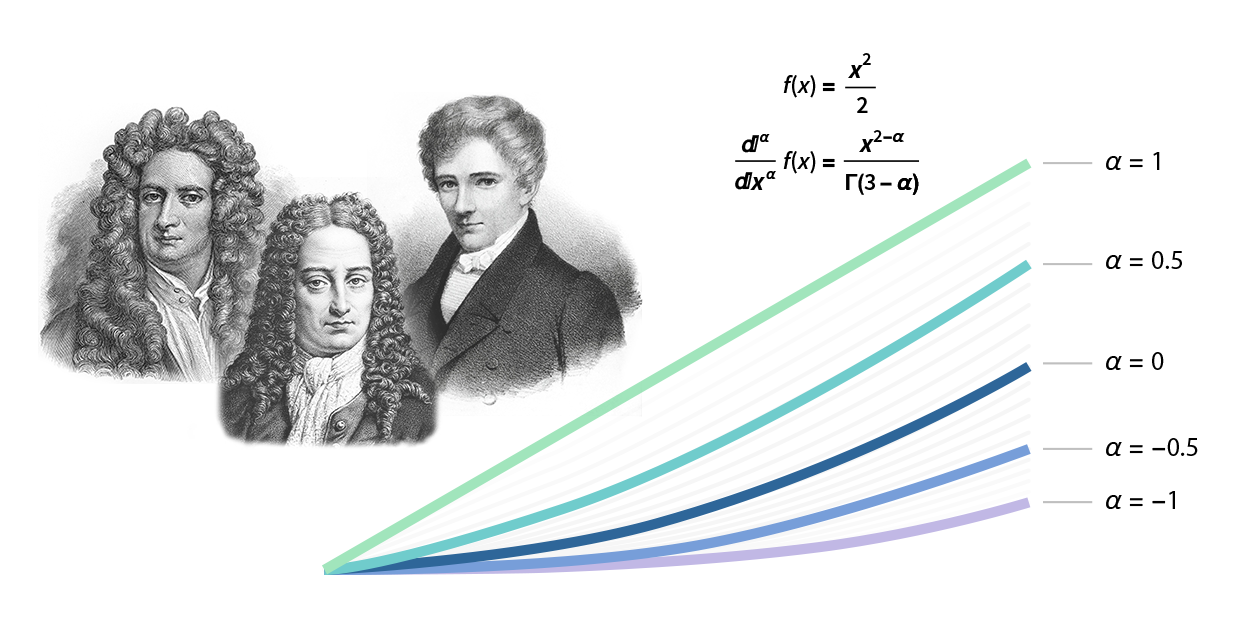
The study of fractional derivatives has long fascinated mathematicians, with its first appearance as early as in a letter written to Guillaume de l’Hôpital by Gottfried Wilhelm Leibniz in 1695, stating ‘Thus it follows that 

Here, we first consider Cauchy’s method for repeated integration.
Theorem [Cauchy, 1823] : Let 



can be compressed as follows :

However we would like to consider non-integer powers in this case. We generalize the factorials using the Gamma function :

This gives us the following :

This looks like a proper definition of a generalized integral for all values of 



Lemma : For an R-L operator, we define the operator 

Based on the usual rules of calculus, we propose that the operator must satisfy the following identities for any infinitely integrable functions :


We shall demonstrate a proof of (3) here.




From this it is trivial that (4) is also true.
In addition to the above, the operator should also satisfy the addition and subtraction operation :

We also propose a generalization for the functional equation for 

Definition : By the Second Fundamental Theorem of Calculus, we denote the following notation 
For 


where 

This may seem repetitive however 




We shall illustrate a few examples of fractional diffintegrals now – for example we consider the half derivative of 


Hence we are trying to find 
![I^{\frac12}[1]=\frac1{\Gamma(\frac12)}\int_0^x(x-t)^{\frac12-1}\cdot1\, dt](https://s0.wp.com/latex.php?latex=I%5E%7B%5Cfrac12%7D%5B1%5D%3D%5Cfrac1%7B%5CGamma%28%5Cfrac12%29%7D%5Cint_0%5Ex%28x-t%29%5E%7B%5Cfrac12-1%7D%5Ccdot1%5C%2C+dt&bg=ffffff&fg=000&s=0&c=20201002)
![I^{\frac12}[1]=\frac1{\sqrt\pi}\int_0^x\frac1{\sqrt{x-t}}\, dt](https://s0.wp.com/latex.php?latex=I%5E%7B%5Cfrac12%7D%5B1%5D%3D%5Cfrac1%7B%5Csqrt%5Cpi%7D%5Cint_0%5Ex%5Cfrac1%7B%5Csqrt%7Bx-t%7D%7D%5C%2C+dt&bg=ffffff&fg=000&s=0&c=20201002)
![I^{\frac12}[1]=\frac1{\sqrt\pi}\cdot\bigr[2\sqrt{x-t}\bigr]_{t=0}^{t=x}](https://s0.wp.com/latex.php?latex=I%5E%7B%5Cfrac12%7D%5B1%5D%3D%5Cfrac1%7B%5Csqrt%5Cpi%7D%5Ccdot%5Cbigr%5B2%5Csqrt%7Bx-t%7D%5Cbigr%5D_%7Bt%3D0%7D%5E%7Bt%3Dx%7D&bg=ffffff&fg=000&s=0&c=20201002)
![I^{\frac12}[1]=2\sqrt\frac{x}\pi](https://s0.wp.com/latex.php?latex=I%5E%7B%5Cfrac12%7D%5B1%5D%3D2%5Csqrt%5Cfrac%7Bx%7D%5Cpi&bg=ffffff&fg=000&s=0&c=20201002)
This also fits our intuition that the order of a derivative of a polynomial directly corresponds to the order of said polynomial. By directly differentiating the function, we obtain that the half-derivative of 1 is in fact 




This is also the case for complex numbers as proven by R.A. et. al in 20123.
We shall also consider here some functions that take values worth noting after differentiation for arbitary orders. One very pretty result is the half derivative of 

For 


However this does not stop here. We can also consider the fractional derivative of 




We first consider the expression 

We apply the definition of the Gamma function, which reduces the equation to the following :

Hence we have proven that this is in fact the generalized form for the diffintegral of the exponential function. Using this, we can take the half derivative of trignometric functions – for this we use the Liouville definition. We first express 



By taking the fractional derivative of the exponent, we obtain ![D^n\sin(t)=\frac1{2i}\cdot[{i^ne^{it}-(-i)^ne^{-it}}]](https://s0.wp.com/latex.php?latex=D%5En%5Csin%28t%29%3D%5Cfrac1%7B2i%7D%5Ccdot%5B%7Bi%5Ene%5E%7Bit%7D-%28-i%29%5Ene%5E%7B-it%7D%7D%5D&bg=ffffff&fg=000&s=0&c=20201002)


![\frac1{2i}\cdot[e^{i\frac\pi2n}e^{it}-e^{-i\frac\pi2n}e^{-it}]](https://s0.wp.com/latex.php?latex=%5Cfrac1%7B2i%7D%5Ccdot%5Be%5E%7Bi%5Cfrac%5Cpi2n%7De%5E%7Bit%7D-e%5E%7B-i%5Cfrac%5Cpi2n%7De%5E%7B-it%7D%5D&bg=ffffff&fg=000&s=0&c=20201002)
![\frac1{2i}\cdot[e^{i(t+\frac\pi2n)}-e^{-i(t+\frac\pi2n)}]](https://s0.wp.com/latex.php?latex=%5Cfrac1%7B2i%7D%5Ccdot%5Be%5E%7Bi%28t%2B%5Cfrac%5Cpi2n%29%7D-e%5E%7B-i%28t%2B%5Cfrac%5Cpi2n%29%7D%5D&bg=ffffff&fg=000&s=0&c=20201002)




Now let’s take a look at how this can be applied to physics.
In classical mechanics, damping is often modeled using a linear relationship between the resistance (damping) force and velocity. The most common example is viscous damping, where the damping force 

Here, 

However, many real-world systems do not conform to this simple linear model. Instead, they exhibit more complex damping behaviors where the resistance force depends on velocity in a non-linear manner, or where the system’s response includes memory effects and non-local interactions.
Fractional calculus provides a framework to model these more intricate damping behaviors. Instead of assuming a linear relationship between force and velocity, fractional models introduce derivatives of non-integer order, capturing the history and rate of change of the system’s motion more accurately.
A common fractional damping model is expressed as:

In such systems described by fractional damping, the energy dissipation does not follow the same pattern as in classical systems. The key difference lies in the memory effects inherent in fractional derivatives. These effects imply that the system’s present state is influenced by its entire past history, leading to a more complex energy dissipation profile. Below are a few examples :
1. Non-Local Dissipation: Unlike in classical damping, where the energy dissipation at any given moment depends solely on the current velocity, in fractional damping, the dissipation depends on the entire history of motion. This non-locality can lead to more gradual or more complex decay rates in the system’s energy over time.
2. Anomalous Relaxation: Systems with fractional damping often exhibit anomalous relaxation behaviors. Instead of the standard exponential decay seen in classical systems, energy dissipation may follow a power-law decay. This is particularly relevant in materials and systems with inherent viscoelasticity, where the rate of energy loss changes over time.
3. Frequency-Dependent Damping: Fractional damping models often lead to a frequency-dependent response, where the effective damping force changes with the oscillation frequency. This can result in phenomena such as fractional resonance, where the system responds most strongly not at the natural frequency but at some fractional frequency.
The application of fractional damping models is especially relevant in engineering, material science, and biological systems. For example:
• Viscoelastic Materials: Many biological tissues and synthetic polymers do not adhere to classical linear damping models. Fractional calculus allows for more accurate modeling of their behavior under stress, particularly when considering long-term effects.
• Mechanical Systems: In mechanical systems with complex damping, such as in microelectromechanical systems (MEMS) or in structures subjected to varying environmental conditions, fractional models can better predict how the system will respond to forces over time.
Lastly, we shall also discuss how this could be extended to the complex region.
We restate the RL fractional derivative :

We see that 

This gives us the following result :

Where 


The reciprocal Gamma function, expressed via the Hankel contour, plays a central role in this formulation. When 


In the complex domain, the interpretation of the fractional derivative becomes more nuanced. The fractional derivative can be viewed as a generalization of integer-order differentiation, but with the order of differentiation now being a complex number. This allows for a much richer set of behaviors and applications, particularly in complex dynamics, control theory, and signal processing.
For instance, in control theory, the extension of fractional calculus to the complex plane allows for the analysis of systems with non-integer order dynamics, which can model real-world phenomena more accurately than integer-order systems. In complex analysis, these fractional derivatives may be used to study the behavior of complex functions near singularities or to generalize known results in complex function theory.
Exploring the implications of fractional calculus in the complex domain opens up numerous avenues for research. One area of interest is the study of special functions, such as the Mittag-Leffler function, which naturally arises in the context of fractional differential equations and has generalizations in the complex plane.
Another potential application is in quantum mechanics, where fractional derivatives in the complex plane might provide insights into the behavior of wavefunctions and the generalization of Schrödinger’s equation.
Furthermore, the relationship between fractional calculus and fractal geometry becomes even more pronounced in the complex plane, where the fractional orders can lead to the emergence of intricate fractal patterns and structures.
In conclusion, the study of fractional derivatives has opened up new avenues for understanding and modeling complex systems and phenomena. It has applications in diverse fields, including physics, engineering, finance, and signal processing. This rich and evolving branch of mathematics continues to inspire researchers and promises further insights into the behavior of real and complex functions. As the exploration of complex-order fractional derivatives progresses, it is poised to make even more significant contributions to our understanding of the mathematical and physical world.
- https://www.sciencedirect.com/science/article/pii/0315086077900398 ↩︎
- https://gallica.bnf.fr/ark:/12148/bpt6k62404287/f150.item ↩︎
- Definition of Complex Order Integrals and Complex Order Derivatives Using Operator Approach, R.A. et. al ↩︎
- Fractional Calculus, Bachelor Project Mathematics, D.E. Koning et. al ↩︎
Leave a Reply